Adaptive, Data Driven Regulation – the Autonomous vehicles case
Autonomous vehicles are quickly becoming a reality. The technology has huge potential to reduce traffic congestion and improve safety – but – , AV pose an array of potential risks that need to be assessed and managed. As such, it is important to understand the safety analysis methods that can be used to better understand the potential risks associated with autonomous vehicle operations.
Engineering justification: first step, is to have a carefully articulated method to demonstrate that we can meet the “acceptable safety criteria”. Two of the most common safety analysis methods are Failure Mode and Effects Analysis (FMEA) and Fault Tree Analysis (FTA). These allow you a method to cover failures and design your system accordingly – with “enough” redundancies etc. Overall, FMEA and FTA are valuable safety analysis methods for evaluating the safety of autonomous vehicles.
Another well-known approach is ensuring that there is no SPOF (Single Point of Failure) built into the system. Known practices include system Hazard analysis, Functional Hazard Analysis etc.
By utilizing these methods, engineers can better understand the potential risks associated with autonomous vehicle technologies and develop strategies to mitigate them, following risk management tool set known for decades.
NCAP scenarios: One of the most important tools available to assess the safety of autonomous vehicles is the New Car Assessment Program (NCAP). NCAP offers a variety of scenarios to help assess the safety performance of vehicles, including those involving autonomous driving technology. NCAP scenarios involve a variety of common driving situations, including intersections, lane changes, and merging. These scenarios, when properly designed and tested, can provide a good indication of how an autonomous vehicle will respond to different situations. Furthermore, the scenarios can be adapted to include more complex elements, such as weather, traffic, and pedestrians, which better approximate real-world conditions.
By utilizing NCAP scenarios, engineers can test and evaluate the safety of autonomous vehicles in a variety of conditions. This helps to ensure that autonomous vehicles are capable of responding appropriately to different driving scenarios, and reduces the risk of poor safety performance in the real world. Overall, NCAP scenarios offer an effective tool for assessing the safety of autonomous vehicles.
Simulation: Statistics and the “longtail” phenomenon necessitate thorough simulation as a way to “meet substantial amount of road surprises”. Analysis teaches us that the requirement calls for billions of Km to be driven in simulators.
ODD: Additional, useful protocol is the operational design domain (ODD), which defines the operating constraints of an autonomous vehicle. ODD is a set of parameters that define the environment or conditions in which an autonomous vehicle can safely operate. These parameters include the type of terrain, weather conditions, speed limits, and other such factors. ODD helps to ensure that an autonomous vehicle is only operated within its capabilities, and thus reduce the risk of accidents or other incidents. When it comes to autonomous vehicles, ODD is of particular importance. By defining the conditions in which an autonomous vehicle can safely operate, ODD helps to ensure that it can navigate its environment without any hazards. Furthermore, ODD protocols are constantly being updated as autonomous technology advances, ensuring that the safety of these vehicles is always kept up to date. At the beginning of the testing program, we can define a Restricted ODD, such that the balance between the “Engineering Justification” level and the restricted ODD will ensure safety on one hand and allow the applicant to gather experience on the other hand.
SPICE[1]: One of the most important tools available to assess the safety of autonomous vehicles is Safety Performance Indicators (SPIs). SPIs measure how well a system is performing and can help to identify areas of potential risk before they become problems. Safety Performance Indicators (SPIs) help to quantify the safety performance of a system by measuring various factors such as speed, steering, and braking, 3 axis acceleration gauges are a good example as these allow you to measure frequency of phantom breaking, reckless driving on road bumps, poor velocity adjustments to the road characteristics etc. By utilizing SPIs, engineers can gain a better understanding of how a system is performing and identify any areas of potential risk. The data gathered from SPIs can then be used to make improvements to the system or adjust its parameters to ensure that it is operating within the necessary safety standards. When it comes to autonomous vehicles, SPIs play a crucial role in assessing their safety performance. By monitoring various factors associated with an autonomous vehicle’s performance, engineers can gain an understanding of how it is performing and make adjustments to ensure that it is operating safely. Furthermore, SPIs can also help to identify potential areas of risk before they become problems. This allows engineers to address any issues before they can cause accidents or other incidents.

*The Image is an AV inspired image created in midjourney by Dror Ben-david
AI can and is used to perceive the world, control autonomous vehicles and make decisions, but it can also lead to errors or unexpected outcomes. To mitigate these risks and ensure the safety of autonomous vehicles, it is important to be able to predict poor safety levels and cope with them before accidents happen. AI has the potential to improve the safety of autonomous vehicles, but it can also lead to unforeseen risks. For example, AI-powered autonomous vehicles may not be able to accurately detect obstacles, find the drivable path, or make the right decisions based on the data they have. As a result, there is the potential for errors or unexpected outcomes that may lead to accidents or other incidents. AI, by nature, in non-deterministic, brittle, can’t reason (the explainability challenge), and prone to introduce biases. To address these potential risks, it is important that the architecture of the AI models, the data bases as well as the processes used to train the AI algorithms, all of those will be transparent to the regulator. Special SPIs need to be defined and monitored (i.e. probability of detection, probability of classification errors, confusion matrices atc. If applicable, it is always preferred to ask the “question from both sides (i.e. – is the road clear and not only what obstacles are there).
Deterministic “Supervisor”: A strong deterministic “supervising” system and a clear safety envelope should be in place too. Systems like “Automatic Emergency Braking” system etc.
Internal faults & Odometery: To ensure the safety of autonomous vehicles and reduce the risk of such incidents occurring, it is important to understand how they respond to internal faults or engine malfunctions. Autonomous vehicles are equipped with sensors and other safety features that allow them to detect any potential faults or malfunctions in the vehicle or its engine. Once such a fault is detected, the autonomous vehicle will typically go into a “safe mode” where it will slow down or stop completely until the issue can be addressed. Furthermore, the vehicle’s onboard systems will also alert the remote operator of the issue, allowing them to take the appropriate measures to address the problem. Risk management strategies are essential for ensuring the safety. In addition to having effective risk management strategies, it is also important for autonomous vehicles to adhere to safety standards such as SAE 26262. This standard provides a detailed framework for ensuring the safety of autonomous vehicles, including measures such as system diagnostics, failure analysis, and verification and validation. By adhering to these standards, autonomous vehicles can help to reduce the risk of accidents or other incidents occurring as the standards reflects all “human kind” cumulative knowledge and experience.
Control centers and “tele-operation”. It is convenient to divide system changes to “minor” (changes that are not expected to have any significant impact on safety) and major. After any major change – we can restrict the ODD again, build trust by testing and measuring ourselves along preset SPI threshold and only then deploy.
Configuration Control: To ensure the safety of autonomous vehicles, it is important to have effective configuration control in place. Configuration control is the process of managing any changes to the vehicle’s configuration, such as its software, hardware, or firmware. This involves tracking changes to the vehicle’s configuration, identifying any potential issues, and taking steps to address them. Additionally, it is also important to ensure that any changes to the vehicle’s configuration are tested and verified to ensure that they are safe and will not lead to errors or unexpected outcomes.
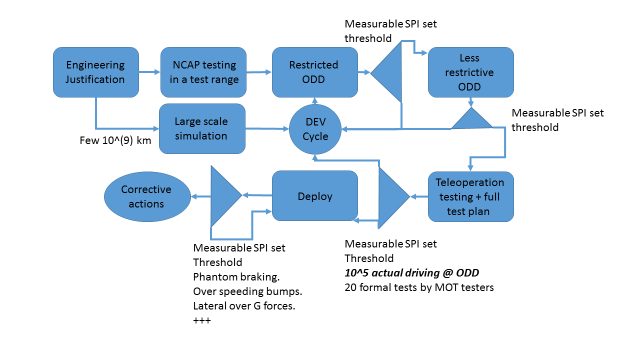
Type conformity Work flow is depicted in the following illustration:
[1] Safety performance indicators analysis, continuous implementation and mitigation.